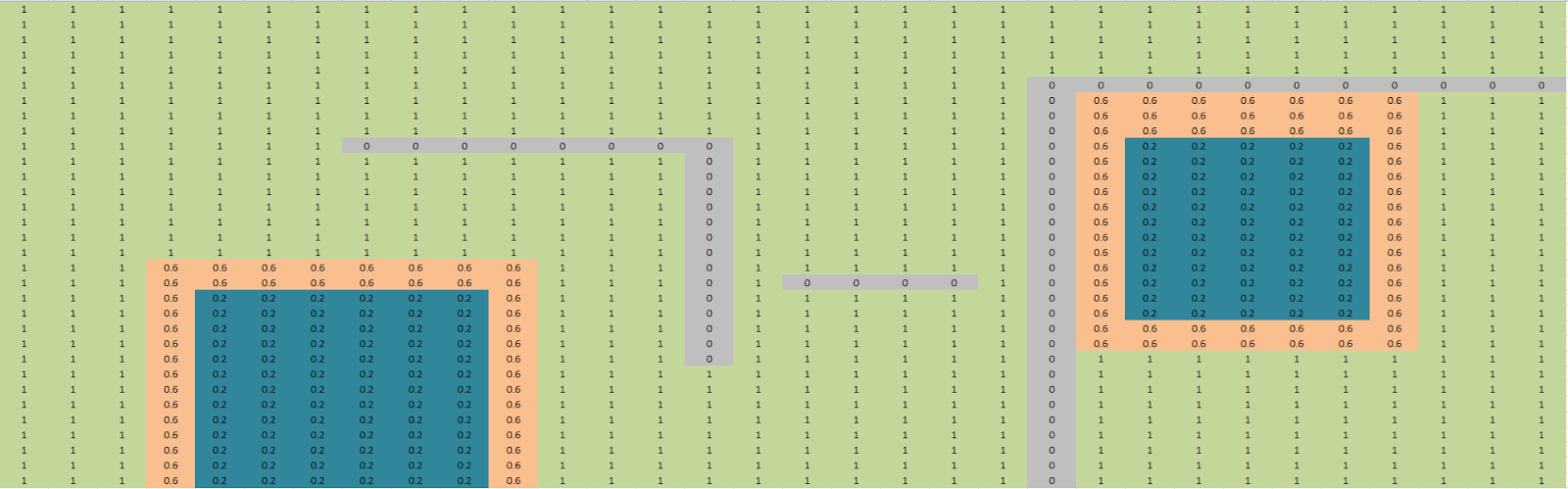
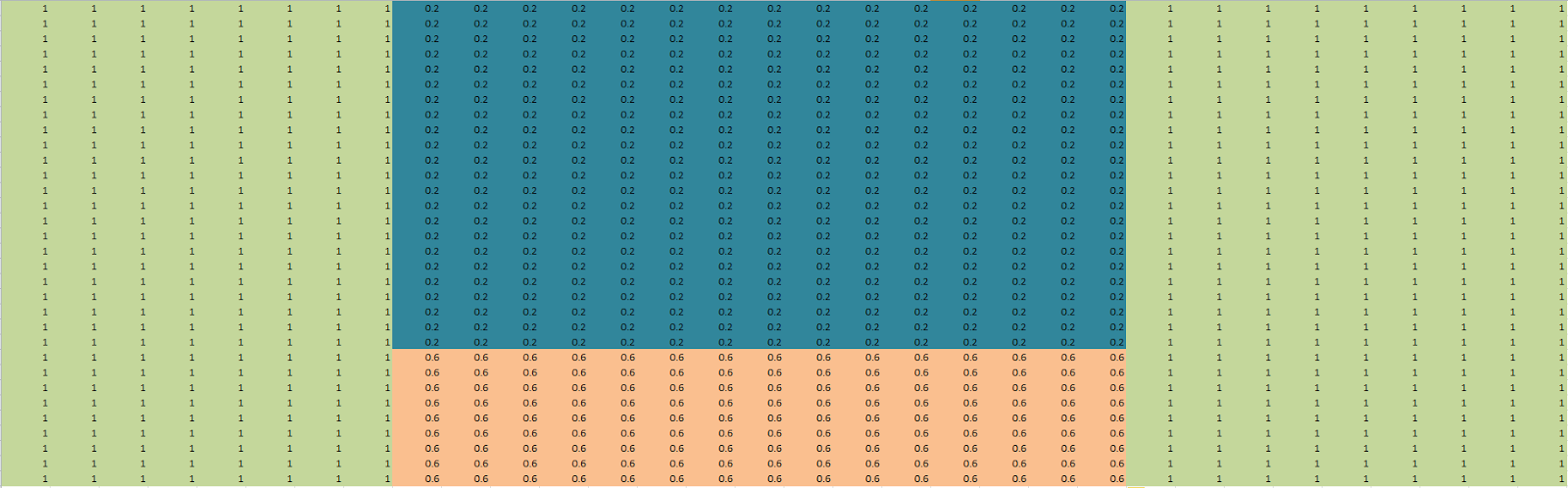
Both diffusion and dijkstra have been tested on larger maps with varying terrain. These maps are 256X256 and each has a different percentage of the map covered with terrain. Terrain costs are represented by a random value between 1 and 10 for dijkstra and 0 and 1 for diffusion. In the images bellow terrain is represented by the red areas. Paths are represented by the blue tiles.
 |
| 0% Terrain |
 |
| 25% Scattered Terrain |
 |
| 50% Scattered Terrain |
 |
| 75% Scattered Terrain |
 |
| 100% Scattered Terrain |
 |
| 25% Centred Terrain |
 |
| 50% Centred Terrain |
 |
| 75% Centred Terrain |
 |
| 100% Centred Terrain |
 |
| 25% Split Terrain |
 |
| 50% Split Terrain |
 |
| 75% Split Terrain |
 |
| 100% Split Terrain |
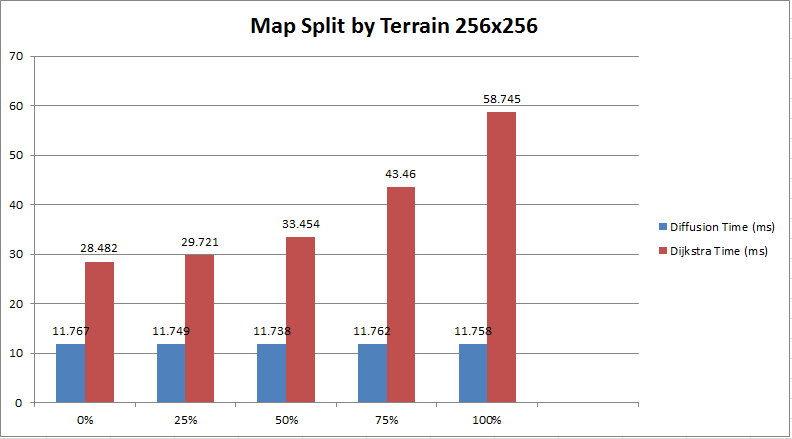
Looking at the graphs above it is interesting to see that for all the maps diffusion performs the same regardless of how much terrain there is in the map and where the terrain is in the map taking 11ms to diffuse the values and find path.
Looking at Dijkstra however for each of the sets of maps we can see that as the amount of terrain in the map increases so does the time it takes to find a path.
Looking at the line graph above we can also see that the position of the terrain in the maps also effects the time taken by dijkstra to find the path. the more scattered the terrain the longer Dijkstra takes to find a path? although this could be due to the fact that there is less terrain? - more likely this?